Este artículo fue publicado originalmente el 14 de agosto de 2019.
Con ventas anuales de $ 8 mil millones, Campbell Soup Co. se encuentra entre las compañías de alimentos más grandes del mundo. Del mismo modo, su planta de Napoleón, OH, también figura entre las plantas de fabricación de alimentos más grandes, si no la más grande del mundo. Con casi 2.5 millones de pies cuadrados, la planta es responsable de más de dos tercios del volumen de bebidas de Campbell y más de un tercio del volumen de sopa en América del Norte. Es irónico, entonces, que una de las primeras aplicaciones de robot de la planta fuese impulsada por la falta de espacio.
El problema era una despaletizadora de frascos de vidrio de bajo nivel para una línea de salsa que contaba con un espacio pequeño con un techo bajo. Como explica Abhijit Choudhury, ingeniero de proyectos de llenado y envasado en Campbell, “sin mucha elevación vertical y sin suficiente espacio alrededor de la máquina, era un espacio muy reducido. Esto dificultó la carga de los palés y la descarga de los frascos de vidrio”.
Muy difícil y muy ineficiente también. Choudhury estima que hasta 200 frascos de vidrio por palet podrían romperse durante el proceso de despaletización, lo que resulta en un tiempo de inactividad significativo de la línea, potencialmente hasta una hora, ya que los operadores trabajaban para garantizar que se recogieran todos los fragmentos de vidrio.
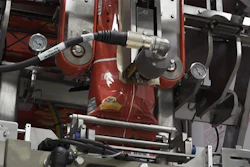
 El robot puede recoger 300 frascos a la vez utilizando un EOAT diseñado para el cliente de UniGripper.
El robot puede recoger 300 frascos a la vez utilizando un EOAT diseñado para el cliente de UniGripper.

La belleza del sistema, relata Choudhury, es la complejidad de las funciones que el robot puede manejar con facilidad, facilitadas por tres herramientas diferentes de fin de brazo diseñadas por UniGripper por Tepro. A una velocidad de 2.5 capas / min, el robot recoge una capa completa de frascos (hasta 300 en total) de un palet y la coloca en la entrada de la línea de embotellado, retira la hoja de nivel o la cubierta de la paleta y la coloca en un área segregada, y luego finalmente recoge el palet vacío y la coloca en otra área segregada.
El proceso de despaletización comienza cuando un operador carga múltiples palets en un transportador que conduce a la celda de despaletización. Con el sistema anterior, los operadores se mostraron reacios a agregar más de un palet a la vez, porque si ocurriera la rotura del vidrio con el palet de plomo, tendrían que retirar todas las palets del transportador para retirar la primera. "Dado que la fiabilidad del robot es tan grande, ahora pueden colocar todos los palets al mismo tiempo en el transportador", confirma Choudhury.
La fiabilidad del robot también significa que se necesitan menos operadores para poner a funcionar la línea. Con el despaletizador de bajo nivel, dos personas fueron asignadas a la máquina, y otra en espera para limpiar los vidrios rotos. Con el despaletizador robótico, ese número se ha reducido a uno, ahorrando a la planta una cantidad significativa de dinero cada año. La transición al nuevo sistema también ha mejorado la moral, haciendo de este un área de trabajo más deseable.
La mejora más notable, sin embargo, está en la eficiencia de la línea. Como explica Choudhury, antes de que Campbell instalara el despaletizador robótico, la línea de la salsa funcionaba con aproximadamente un 54% de eficiencia, con aproximadamente un 56% de tiempo de inactividad, el 80% del cual era causado únicamente por el despaletizador. "Así que, obviamente, era una gran área de mejora", dice. “Ahora el despaletizador funciona alrededor del 99.5 por ciento del tiempo, y la línea funciona con una eficiencia del 80 por ciento o mayor todo el tiempo. Con solo esos puntos de eficiencia del 30 al 35 por ciento ganados, hemos ahorrado miles".
En conjunto, el aumento de la eficiencia, la reducción de la mano de obra y la disminución de los materiales perdidos debido a la rotura sirvieron para justificar la considerable inversión en tecnología en robots. Tomar la decisión de invertir significativamente más que el costo de un despaletizador tradicional no fue fácil para Campbell, pero en este caso, dice Choudhury, fue la correcta: “Como ingeniero, debes elegir si se necesita realmente una mayor inversión. En este caso, podríamos justificar que sí, era necesario para lo que estábamos tratando de implementar".